2026年06月12日
星期五
近日,安徽师范大学物电学院智能电磁感知团队在机器人领域国际顶级期刊《IEEE Robotics and Automation Letters》发表论文“Path Planning for Mobile Robots Based on Hybrid Sampling and Space-Optimized RRT”,第一作者为硕士研究生胡耀炜,通讯作者为副教授汤萍萍。
该团队在安徽省智能机器人信息融合与控制工程研究中心的支持下自主研发智能导航系统,而路径规划是智能导航系统的核心,当前热门的RRT路径规划方法在智能导航系统的应用存在诸多问题,如路径冗余节点过多、路径平滑度太低、运算时间较长、极易产生局部最优解。为此,本文提出混合采样和空间优化的HB-RRT算法。首先,采用混合采样代替原有的随机采样,混合采样由高斯采样和并行采样构成。混合采样在采样过程中对随机点采样空间进行优化,不断改变采样区域提高采样效率;在扩展过程中基于势场的扩展策略并结合自适应扩展步长减少过度的探索。其次,为克服贪婪双向搜索带来的性能不稳定性,提出一种前后向路径优化方法,修改双向搜索的交换策略,并结合直连策略快速规划出初始路径。最后,为更好地实现智能导航系统的跟踪控制,设计了一种分段B样条路径平滑器。
研究团队在多样的真实环境中验证HB-RRT的有效性,以及与当前热门算法相比的优越性,对比算法包括Bi-RRT、IBi-RRT和RB-RRT。为保证对比公平性,每种算法使用相同的碰撞检测、数据处理等子程序,算法的扩展步长均设置为30。考虑到基于采样的算法的随机性,在每种实验场景下,四种规划算法都执行50组独立实验,规划时间、路径长度、采样次数和路径节点数以平均值的形式表示,以确保实验数据的准确性。从表1可以看出,在任何实验环境下,HB-RRT都以更短的规划时间和更少的采样点得到质量更高的路径,节点利用率最高、标准差最小,算法性能更稳定。

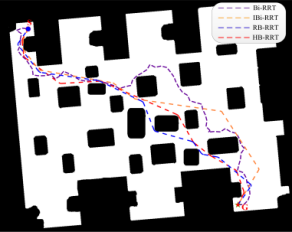

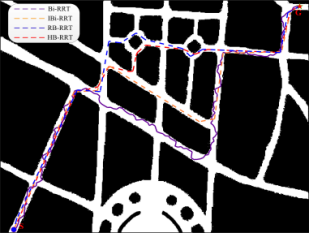
图1 室内和室外实验环境举例
新闻链接:https://www.ahnu.edu.cn/info/1107/162250.htm
网站内容来源于互联网,由网络编辑负责审查,目的在于传递信息,提供专业服务,不代表本网站平台赞同其观点和对其真实性负责。如因内容、版权问题存在异议的,请与我们取得联系,我们将协调给予处理(按照法规支付稿费或删除),联系方式:ahos@aiofm.ac.cn 。网站平台将加强监控与审核,一旦发现违反规定的内容,按国家法规处理,处理时间不超过24小时
版权所有:安徽省光学学会(社证字第 0156号)
地址:安徽省合肥市蜀山湖路350号中科院安徽光机所一号楼
EMAIL:ahos@aiofm.ac.cn
